����
ת�Ӳ�������ָ���ڻ�е�����졢��װ������������������ػ��¶ȱ仯��ĸ��ֱ��Σ�ʹ�����ڹ���״̬ʱ�������������Ӷ�������߲������ߵĶ���λ����������ת�Ӳ������У�ƽ�в����С��ǶȲ����С��ۺϲ����С�ת�Ӳ��������ת�ӵ�������������еĸ����غɣ���ʹ����м���غ����·��䣬�������ǿ�ҹ���
������Ҫ�о�ƽ�в����У�����������漼����ͨ��Ƕ��Hertz�Ӵ����۽������ϵͳ����������ģ�ͣ�Ϊ����������������ת��е���ϵ���ϵĿ������о��ṩ�����ݡ�
1 ����ģ�͵Ľ���
��ij��ҵԭ�ϳ����ϵͳΪ�о����÷��ϵͳ�е綯��������Һ������������ٷ���ķ������ɣ��м�ֱ����ĤƬ�������ͳ�ʽ���������ӳ�һ���壬��ϵͳ���ü�ͼ1.����Pro/E���������������ģ�ͣ�������Mechanism/Pro�ӿڶ�ģ�ͽ��и��廯���壬Ȼ����ADAMS�����ж��������֮���Լ�������Է���ģ�͵���ȷ�Խ��м��飬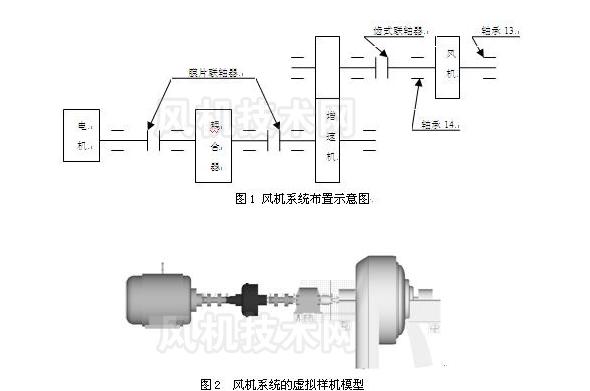
�ڶ�ģ���г�ʽ�������Ĵ��������У������������������ʩ��ʵ��Ӵ�����Ҫ�����ļ���ʱ�䣬�����ھ���������������ʧ�ܣ����ԶԳ��������سݿ������ƫ������˼��������سݿ�����Ӵ���Ϊ�߽Ӵ������ֳݵij���������ADAMS�е�����������Ϲ������ɵģ���ͨ�������ߵIJο������꣬������Ƕ�뵽ʵ������С�
2 �����������й��ϻ���
��ʽ������ƽ�в������Ƶ��������������������߲���ͬһ��ֱ���ϣ������ƽ�б���һ�ξ��룬����ת״̬�²�������Ӧ����ͼ3.�ڷ���ƽ�в����й��Ϻ���������ʵ���˶������ͼ4.
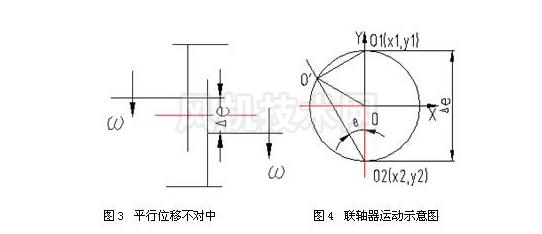
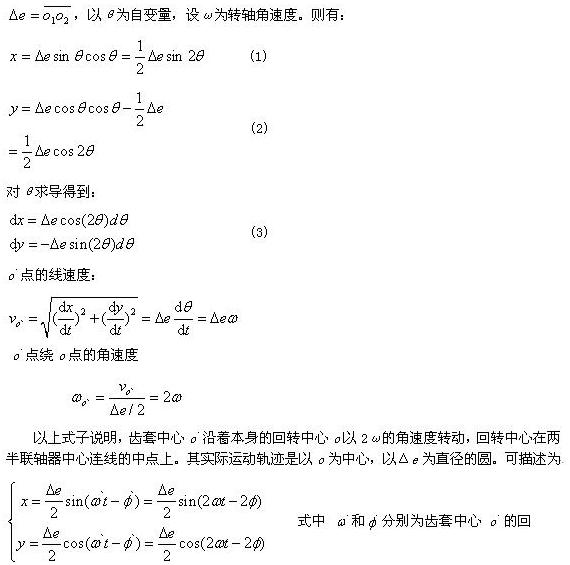
��O1����������������ģ�O2���Ұ������������ģ�O�F�dz������ģ�ƽ�в�������Ϊ

3 �������
3.1 �Ӵ�������ѡ��
����Hertz�Ӵ����ۺͳ�ʽ����������Ҫ������������ֳ����ϸն�kΪ15.067e+5N/mm/3/2,����ϵ��DampingΪ3000N.s/mm,��ײ��ָ��Ϊ1.5�������Ϊ0.1.����ϵ��Ϊ0.1�����ڽ����߳��֣��乤�������г������ϵ��λ���DZ仯�ģ����ڸ����ϵ�����߰뾶���Žڵ����ϴ������ʰ뾶���²��������R��һ�����������ǵ����ֵijݸߺͷֶ�Բ�뾶�Ƚ�С���䶯��Χ�����ڼ����н����Էֶ�Բ�ϵ�ֵ�����档
��ϵͳģ�ͽ���0.5s,300���ķ��棬�õ�ϵͳ������Ӧ�����ߡ�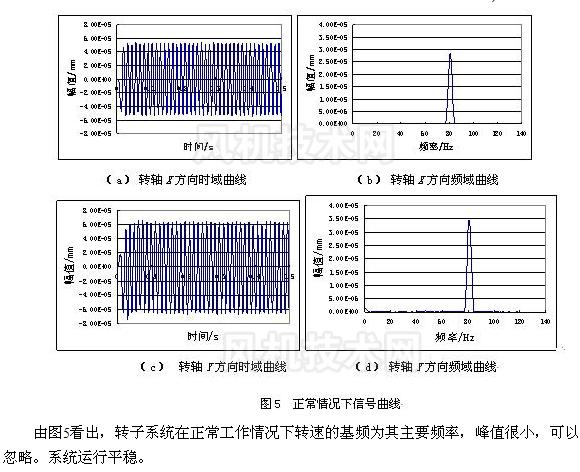
3.2 ����ȵķ���
��ϵͳ����������Ϊ�����������������ڹ��������Զ��������IJ��������������ڽ�ģ�н��е�Чת����Ϊ�˸����ԵĿ��������й��ϵ�������ȡ���������ֱ�Ϊ0.5��1��2��3��ת��Ϊ�ת��4843r/min,����0.5s,300�����棬�Բ�������3mmΪ������ͼ6

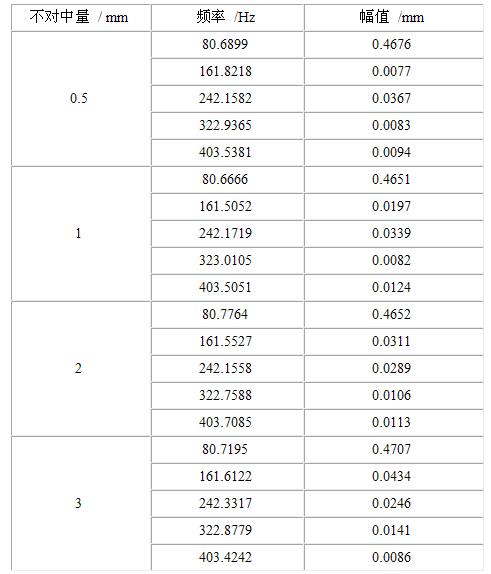
ͨ���Է��ת��ϵͳ�IJ����й��Ͻ��еĶ���ѧ����������ó����ۣ�
��1���ڳ�ʽ�����������й��ϵ�����£�ת��ϵͳ�����г���Ƶ�⣬����2����3����4����5�������
��2������2��Ƶ���������ֵ���Ų������������Ӷ�����
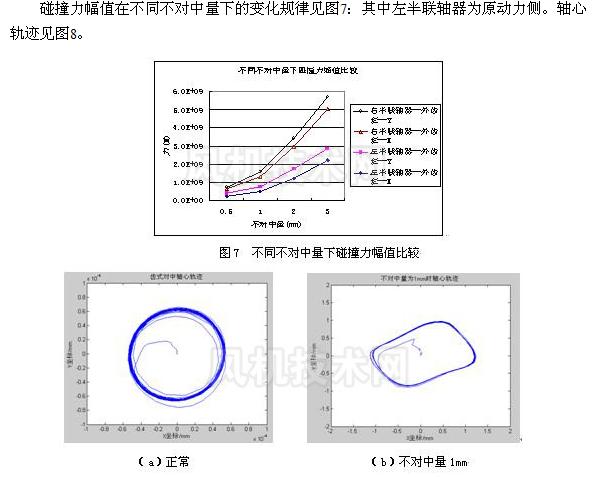
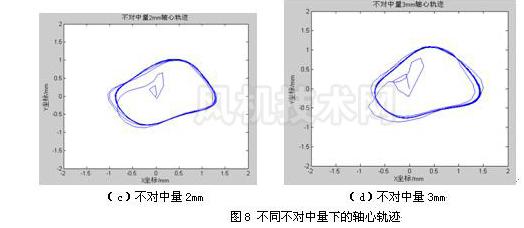
��3�����Ĺ켣���Ų���������������������ʱ��Բ�ι���Ϊ�����㽶��
��4����ʽ����������ײ�������ֵ�벻�����������ȣ����Ų������������ӣ�����ֵ��������
4����
��ϸ�����˳�ʽ�������IJ����й��ϻ������ڴ˻����ϣ��������������ķ��漼�������˸÷��������ģ�ͣ����ж���µķ����������ȡ�������źţ�ͨ��ʱ��IJ���ͼ��FFTƵ��ͼ�����ݡ�����ͼ�����Ĺ켣���з������õ������й��Ϲ��ɣ������������۷����Ƚϣ�������Ǻϣ�֤ʵ�˷���������ȷ�ԡ�
�����
1 ���� ��ʽ����������ת��ϵͳ�Ķ��й��ϻ�����ʶ��
2 ����Ⱥ�� �����������������ij�������������ѧ�����о�
3 �ֳ��� ���������ڻ������Ƽ������е�Ӧ���о�
4 ���ɲ� ���½� ��ռ�� ��ת��е�������о���������
| 






